���������\���c���r���й����ھ��|�������y�Լ��ݣ������@�ɴ��ܵ�ܛ�w�C�����_�l�����R��������Ȼ�繲��ϵ�y���l�����ݴ�W���ꖽ����c���Ϲ��I��W���ν��ڈF�ͨ�^�ň��T���M�b�����_�l��һ�N�{�ͺ����ˮ���z��ԓ��������Fe3O4@MXene��ˮ���z�W�j���γ��ݶȷֲ����Ķ����F�˴����c��׃���������ąfͬ�����Ƃ��ˮ���zչ�F���������ԣ����Ì���ԣ�2.6 mS/cm�����ߑ�׃�`���ȣ�GF=6��������׃푑�������0�C580%���̓�����ƣ���ԣ�500Ȧ����ͬ�r�߂�30�� /s�Ŀ��ٴ����ٶȡ�ԓ�о��ĺ���ͻ���������c�����چ�һ�����Ѕfͬ������ʹ���܉���г�����׃��ͬ�r���r�O�y�����\�Ӡ�B���@һ����ͨ�^�������õõ�չʾ����ץȡ�����ڸ�֪���w���{��ץ�����������Ɍ��rۙ�����\��܉�E�����о��阋�����Ѓ��ڷ����C�Ƶ�����ܛ���|�ṩ���·�ʽ�������m��ܛ�w�C���ˡ������t�W���˙C�����I���_������;����
2025��11��26�գ����P������Gradient-Structured Hydrogel with Integrated Actuation and Strain Sensing for Biomimetic Robotics���}�l����Advanced Functional Materials�ϡ�
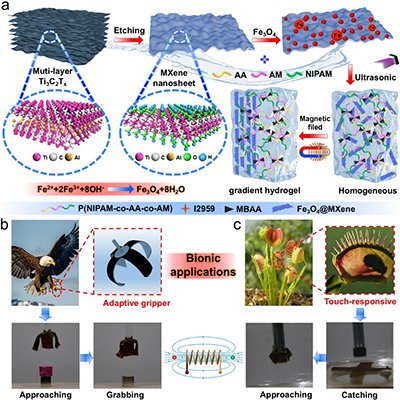
�D1. (a) S1:2M2ˮ���z�cFe3O4@MXene���Ƃ�ʾ��D��(b) ���B�ʳ���l����צ�ſزٿv����(c) �²�ω��ˮ���z�����IJ��@�О顣
���W�c�Y�������Y���������c��PNIPAMˮ���z�����쏊��40 kPa���������L��160%����ȣ�����AA/AM����������@�����������쏊��110 kPa���������L��580%������C�����������á��t����V��N-H����3317 cm-1����3314 cm-1���C��Fe3O4@MXene�c�ۺ�����|���ڏ�����á�XRD�D�V�@ʾ�ň��T��ʹFe3O4@MXene�ģ�002����λƫ�ƣ����S������ӌ��g����2.72 nm�pС��2.57 nm�������{��Ƭ�l���������С�EDSԪ�طֲ��D�C��Fe3O4��MXene�������ֲ����γɮ��|�Y��SEM�D���Mһ����ʾ�����yˮ���z���о��|��Y������S1:2M2ˮ���z�غ�ȷ�������B�m�ݶ�׃�����ҳ���ň��������u�pС��ԓ�Y���cFe3O4@MXene�Ŀ��g�������P��
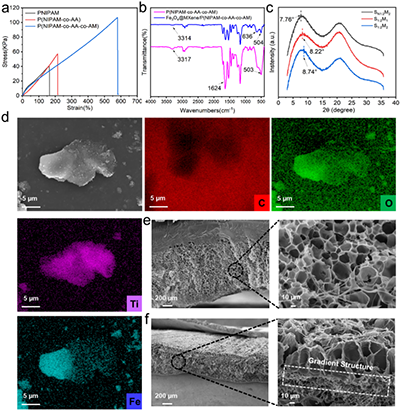
�D2. ��a��PNIPAM��P(NIPAM-co-AM)��P(NIPAM-co-AA-co-AM)ˮ���z�đ���-��׃��������b��P(NIPAM-co-AA-co-AM)ˮ���z���c��Fe3O4@MXene�ͺϺ��ļt����V����c��Sn:2M2��S1:2M1�cS1:2M2ˮ���z��һ�S�V��X�侀����D�V����d��Fe3O4@MXene��EDSԪ�طֲ��D����e��Sn:2M2�c(f) S1:2M2ˮ���z�M����ĵͱ��c�߱�SEM�����D��
�������^���У��ݶ�ˮ���z�е�Fe3O4@MXene�ڴň��c������ͬ�����°l���ֲ�׃�����錧��c��׃���е��p��푑��ṩ�˽Y�����A���ň��T������Ч�{�ؑ�׃�`���ȣ���GFֵ�SFe3O4�������ӳ�������څ�ݣ����c�����ڴň������ϵķe�����P���H��Fe3O4��ˮ���z�`�����^�����MXene�������������ܾ����P�I���á�S1:2M2ˮ���z���F���늌����c��׃푑����f���{�ͺϲ��ϽM�ɵ���Ҫ�ԡ���Ч�·ģ���Mһ����ʾ���ň����R��ĽY����Rn�����������裬���ڟo��Rk���c�ߝ�ȶѯB��B��Rm�����f��Fe3O4ͨ�^���M��ȡ���c���ͽ�����裬��Ч������늺ɂ�ݔЧ�ʡ�

�D3. ��a���ݶ�ˮ���z����r�Ȳ�Fe3O4@MXene�{���w��������׃ʾ��D����ͬ�M��ˮ���z����b-d����׃�`��������e-g��늌��ʣ���h-j����ͬ��B���o�ň����ǶѯB���o�ܶѯB����Fe3O4@MXene�c�ۺ���朵Ę����c��Ч�·ģ��
S1:2M2��0-450%��׃�����ȳʬF��������푑��^�g����׃ϵ����GF���քe��2.91��4.25��6.00���M�σ��Ƚӽ�1��չ�F�����ʵđ�׃�z�y��������ѭ�h�A�����켰��ͬ���ʣ�10-200 mm/min���c��С��׃������1-6%��10-100%���yԇ�У������푑����ٷ������؏��Ըߣ������ɴ����������r푑��r�g�H70 ms���m���ڌ��r���׃�O�y���ضȂ��з��棬�ڵ͜^��0-31�����c�ߜ^��31-45���������ض�ϵ����TCR���քe��-2.80%/����-0.54%/�����m��������ضȱO�y���t������ֱ�^�C����������ԣ�����20%��׃�½�500��ѭ�h����̖�Ա��ַ������;��ԃ������C�ρ�����S1:2M2�ڙz�y�ޡ�푑��ٶȼ��ض�푑���������ڶ���ͬ�ϵ�y��

�D4. S1:2M2�Ă�������(a) ��0-450%��׃�����ȵ��������׃������R/R0�����������`���ȣ�GF����(b) S1:2M2�ڑ�׃��0-100%���µ���R/R0푑���(c) �������r��׃��������푑��r�g����R/R0��(d) 1%-6%��(e) 10%-100%�đ�׃��(f)10-200 mm/min �IJ�ͬ�����µ�׃����(g) ��20��C ��80��C �Ĝضȷ����ȣ���������׃�����䌦���Ĝض�ϵ����TCR������h��S1:2M2�c���Mˮ���zϵ�y�ڶ�������ϵČ��ȣ���i��S1:2M2�c�������ˮ���z����������푑��r�g�ϵČ��ȷ�������j-l��S1:2M2�� 20����35����80���µļt�������D��m����׃�������� 20%��׃���B�m500�����ڵ���R/R0׃��
S1:2M2ˮ���z�����w�\���c������̖�O�y�б��F���������ܣ������H���`���z�y��ü��Ц�ȼ��沿���飬߀�ܜʴ_�R�e15����90����ͬ��ָ�����Ƕȣ����ڹ̶��Ƕ��±�����̖������ͬ�r����Ч�O�y�⡢ϥ������P���Ĵ�����\�ӣ����׃���c���H������B�߶��Ǻϡ����c����ˮ���z늘O�Č����У�S1:2M2���}���c��늈D̎�ɼ��IJ����c���îaƷ��һ�£�չ�F�����齡���O�y늘O���ϵđ��Ý�����
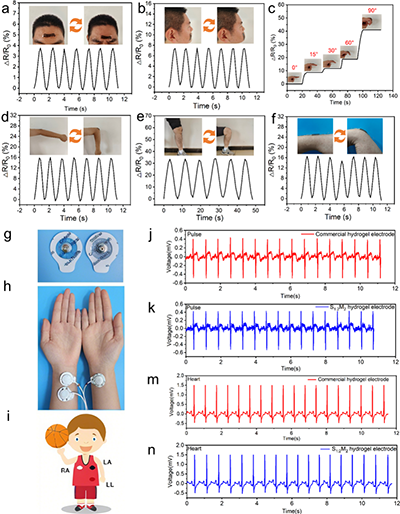
�D5. ����S1:2M2�đ�׃�������ڱO�y���w�\�ӷ�������ܱ��F������������(a) ��ü��(b) Ц��С��׃���������׃����(c)ʹ��ԓ��׃��������֪ʳָ�Բ�ͬ�Ƕȣ�15�㡢30�㡢60��� 90�㣩��������̖����׃��(d) ���⏝����(e)ϥ�w������(f)���������������׃������g������ˮ���z늘O�cS1:2M2ˮ���z늘O�Č��ȣ���h���}����̖�ɼ��Ă���������λ�ã���i����늈D��̖�ɼ��Ă���������λ�ã�����ˮ���z늘O��(j)�}����(m)���K̎��ECG��̖��S1:2M2ˮ���z늘O��(k)�}����(m)���K̎��ECG��̖
�ڴ����£���צ�ٿv����ģ���B�ʳ����ץȡ���w��������ω���ڿ���Ŀ�˕r�������Ϗ�������ɲ���ͬ���O�y�������׃���C�������c�Ԃ����چ�һ�Y���е�ͬ�����F��S1:2M2����ˮ��ͨ�^�ⲿ�ň����ƌ��F�����΄ӣ���ֱ���Õr����ӽǶ��_34����푑��ٶȞ�34��/s�������׃�����c�ӽǶ��@�������P���w�F���ݶȽY���cFe3O4@MXene�����ܵąfͬ����Ч�������⣬ͨ�^�ض��|�l���Mһ����C���܌���֪��̖�D�������О飬���F�ˌ��ߜ����w���x���Բ���
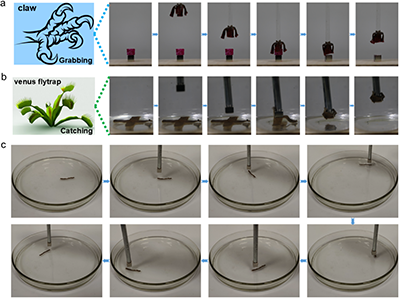
�D6. ��a����צ�ٿv���ڴ�����ץȡС���w��ģ���B�ʳ�О飻��b�����в�ʳ�����ķ�����ω�ݣ���c��S1:2M2ˮ���z��ˮ�д����������΄�
늻��W�迹�V�c늌��ʜyԇ�������S���ň����ȏ�825 mT�p����113 mT��ˮ���z��늌����������͡�SEM��ò�����Mһ���@ʾ���ň�����Խ�ͣ��Ȳ��ݶȽY��Խ�����@�������ϣ����ň����Ƃ��ˮ���z��ˮ���΄Ӻ����wץȡ�б��F������ͬ�r���ӽǶ��S���F�������Ӷ������C���ˏ��ň��γɵ������ݶȽY��������������c�����ܾ����P�I���á�
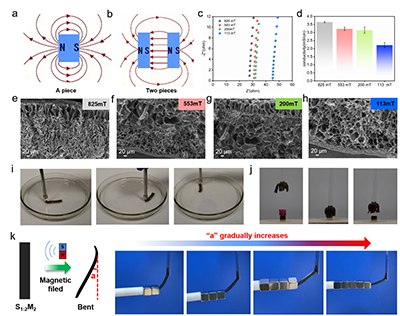
�D7. ��a���ΉK���F�γɵĴň�ʾ��D����b���ɉK���F�γɵĴň�ʾ��D����c����ͬ�ň�������S1:2M2��EIS�D�V����d����ͬ�ň������� S1:2M2��늌��ʣ���e-h���քe�� 825 mT��553 mT��200 mT��113 mT�ň������� S1:2M2����ò�Y������i��S1:2M2��ˮ�е��΄Ӡ�B����j��ˮ���zץ�ֵĠ�B����k����ͬ�ň��l���´ň��T����S1:2M2ˮ���z�ӽǶ�׃��
���Y�����о������һ�N�ň��T���M�b���ԣ�ͨ�^�ڜ����Թ�����W�j�И���Fe3O4@MXene�{�ײ��ϵ��ݶȷֲ���ͻ���˂��y���|ˮ���z�y�ԅfͬ���F���c���еľ��ޡ�ԓ�����چ�һ�Y�������ϴ����c���r�Ը�֪���ܣ��γ�������֪-����һ�w���]�h��Fe3O4�cMXene�ąfͬ�����x��ˮ���z�ߌ���ԡ���푑����c���W���ȣ����F�ˌ���׃�����ĸ��`���ȱO�y�c���ٴ��ӡ�ԓˮ���z�ڷ���ץ�֡��ɴ������м�������̖�z�y�ȷ���չ�F���V�����Ý�����������ܛ�����cܛ�C���˵İlչ�ṩ���·�ʽ��
ԭ��朽ӣ�https://doi.org/10.1002/adfm.202524820
- �Ϲ��������n�}�M AFM�����п�Ҋ�⼤��������Ϳ�����ˮ�Ծ۰�����׃������ 2025-05-13
- ���B������W�������ڈF� Small���������ԑ�׃���еď��g���������������ؽ�ˮ���z 2025-02-11
- �K�ݴ�W������n�}�M Compos. Sci. Technol.: �m���ڔ����t���в�ͬ�h�������m��푑����������ԑ�׃������ 2025-02-02
- ��h��Wꐳ���/�Ĵ���W���� ACS Nano�������ݶ�ˮ���z늽��|���惞�����������\�x��늳� 2025-07-21
- ����ꡢ����������ꐝ�/κ���ܡ�Adv. Mater.���������`���Թ���x��Ƥ�w��늈��T���p�ݶ�ˮ���z�x�Ӷ��O�� 2025-04-03
- �|����W��Ұ�F� NML����������Ը�֪�ӵ��ݶ�ˮ���z����ܛӲ�C���˵��h�̽��� 2024-01-10
- �Ϲ�����f�������w/�w��혡�Adv. Funct. Mater.�����o���ʎ�ӵľ��й��{���\�ӵķº������ԙC���� 2025-08-09
