�܉���mݔ���Cе��������ʎ�\���������w������������P��Ҫ�����ã��@���l���˂���������ʎ���OӋ���ͷ������ԙC���ˡ���������ʎ���������ԙC���˿���ģ�M���С���Ӿ�ȷ����\�ӣ�����˙C�����\�ӵ����ܺͶ����ԡ�Ȼ������ǰ������ʎ���������Ҫ���_�����ⲿ�̼����������/����ݶȡ��D�����Ĺ��յȡ��OӋ�Y�����Ρ��ɿص�����ʎ�������Լ��ڴ˻��A�ό��F�����ԙC�����\�ӵľ��_������Ȼ��һ������
���գ��Ϸʹ��I��W���f�о��T�������w���о��T�F��c�w��혽����������lչ��һ�N�o��ӵ�ʯīϩ��ʎ����ԓ��ʎ���܉���ֱ��늉��̼��®a�����m��ʎ�\�ӡ��ܺ����\�ӆ��l���Mһ���OӋ��һ�N�/��fͬ�ӵķº����C���ˣ�����ʯīϩ��ʎ��������������ṩ���M������������������������ǰ���������\�ӷ���ԓ�C�����܉����/��̼����F�y�����w�Ƅӡ��@�_�ϵK����cͣ܇�ȿɿ��\�ӡ�
2025��7��29�գ����P�ɹ�����Seal-Bioinspired Electrostatic Oscillation-Based Soft Robot with Light Tunable Locomotion�����}�l������Advanced Functional Materials���ϡ�
��������ꑵ�Ҳ����ˮ���\������D1a��ʾ����ˮ���\���r��������Ҫ�����[�Ӻ������ṩ��ǰ����������ͨ�^�Ĵ�ǰ������׃�\���������֮�£�������ꑵ��ϻ�ӕr����Ҫ���ز��������|�c��ͨ�^�����ı��������ǰ�Ƅӡ�����ȱ�������B�m�Ĵ����ṩ�ľ�����������ڵ��������Ƅ��ٶ������^�����ܺ����ɷN�\��ģʽ�Ć��l���OӋ��һ�N���пɿ��\�ӵķº����C������ԓ�C���˰����ɂ��������D1b����1���C�������w��ֱ��늉��ӵ�ʯīϩ����ʎ���Ƴɣ�ģ�M�����������B�m�Ĵ��\���ṩ�����������2���C���˃ɂȰ��b�˃ɂ���������ģ�M������ǰ�������{���\�ӷ���

�D1 (a) ������ˮ�к�ꑵ��ϵăɷN�\��ģʽ��(b) ģ�º����\�ӵ��/���ӵ����ԙC���ˡ�
ԓʯīϩ��ʎ����ұ����Y���������ڃ�ƽ�а�늘O֮�g��һ�˹̶�����һ�����ɑҒ졣ֱ���Դ�B���ڃ�늘O�������ṩ������ֱ��늈�����늘O֮�gʩ�� 360 V ��ֱ��늉���늈����Ȟ�24 V mm?1����ʯīϩ��Ĥ�ڃ�늘O֮�g�a���˳��m�����ҏ�����ʎ����D2��ҕ�l1��ʾ������ʎ�\�ӵ��әC�ƚw�����o늸Б�Ч�����Լ���늘O��׃��������o�������׃������ʎ�\�ӵ��l�ʿ�ͨ�^ʩ�ӵ�늉������ƣ���100 V mm?1��늈������£���ʎ�l�ʿ��_10.8 Hz��ԓʯīϩ��ʎ��߀���г�ɫ�ęCеݔ�����ܣ��ܔy������������9�������w��16.8���ˣ����m��ʎ��

�D2 �o��ӵ�ʯīϩ��ʎ���������ܡ�
����ʯīϩ��ʎ����ֱ��늈��³��m��ʎ�\�ӵ����ԣ������������혋��һ�N���͵��-�Cе����ϵ�y��ͨ�^ģ�º�����ˮ����ꑵ��ϵ��\�ӣ��OӋ��һ�N������늈��������Ƅӵķº������ԙC���ˣ���D3��ʾ��ԓ�C������ʯīϩ��ʎ���������������������PI����Ĥ�����w��ʯīϩ��ʎ���a������ʎ�\�Ӟ�C�����\���ṩ�˳��m�ęCе��������A��PI���w��C���˵��\���ṩ��֧���c���������ڜp�ٙC�����c����֮�g��Ħ����ͬ�r������������늽^������߀���Ա���ʯīϩ��ʎ����늘O��֮�g����·�L�U���c������ˮ��ͨ�^�[�Ӻ�����ǰ�Ƅ���ƣ���ʩ��늈��r���º����C���˿���ͨ�^ʯīϩ��ʎ����������ʎ��늘O���ό��F�����\������30��ȣ��C�����\���˼s49���ľ��x��ԓ�º����C����߀���Ў�ؓ�d�Ƅӵ���������ֱ��늈��Ĵ̼��£����Ԕy��һ���s������5.2����44.6 mg�������w��ǰ�\�����@������ԓ�C��������������еĝ��ڑ��ã����ڪMխ�Ď�늭h�����\ݔ���w���z�y�ȡ�
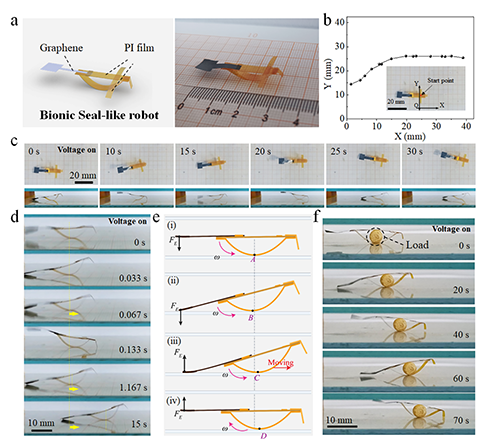
�D3 ��ʯīϩ��ʎ�������R�_�ķº����C������늈����µ����������\�ӣ����y�����w��ǰ�Ƅӡ�
ͨ�^늈��ӵęCе��ʎ�\�ӣ����Գ������F�º����C���˵������\�ӡ�Ȼ�����H����ʎ�\�Ӻ��y���ƙC���˵��\�ӷ�����ˣ��Mһ�������ܮa������׃�ε����������������ǰ�����������\���������˜p�ٷ���ǰ���ļ��댦�C�������w�Y�����\�ӵ�Ӱ푣��x�������h�̲ٿص��������혋���C���˵ķ���ǰ�����D4a�����������®a�����ٴ�׃�ε�PE/MXene���������D4b��c���M�b�ڙC���˃ɂȁ��������\�ӷ���ʩ��ֱ��늉���ʯīϩ��ʎ���a����ʎ���ƄәC����ǰ�M���ڴ��^���У��������䵽�������ϣ�ʹ��׃�β����|���O�壬�����Ƅ��еęC�����D��������C��չʾ�˷º����C������늉����յ��p�ش̼��£�����S��܉�E�@�^�ɂ��ϵK��D4d��ҕ�l4������104s�ȣ�ԓ�C�����Ƅ��˼s180 mm���Ҿ������õ��D���ԣ��D4e����

�D4 ��/늲ٿصķº����C���˼���ɿ��\�ӡ�
�����әC����ǰ�M�⣬ʯīϩ��ʎ��߀����ͨ�^������OӋ�혋���܉��B�m�A���\�ӵ����D�C���ˡ�ʯīϩ��ʎ����늈������®a�����������әC����형rᘷ������D�����D�C�������DһȦ�H�� 0.88 �루�D5����

�D5. ����ʯīϩ��ʎ�������D�C���ˡ�
ԓʯīϩ��ʎ���Լ������C���˾��нY�����ס��Cе�ܳ��mݔ�����ɿ��ԏ��ȃ��c�����������ھo��������O�䡢���w�^��ݔ늾�·�ăȲ��\�к�Ѳ�z������������һ�N�Cеݔ������������늙C��ʯīϩ��ʎ������ͨ�^늘O��С�ͻ������Ի��Mһ����չ���÷��������������ܙCеϵ�y����ܛ�C���˵��I��չ�F���^���ǰ����
ԭ��朽ӣ�https://doi.org/10.1002/adfm.202512768
