�����|�X�������V�������ڷ��˙C���ˡ��ɴ����t(y��)���������˙C��������d���g(sh��)�I(l��ng)�������ķ�(w��n)�����c��֪��������˸���Ҫ�����������ڏ��s�Cе�l��������С��߉����������@��ӽY(ji��)��(g��u)�Ă��������װl(f��)������ӻ�ʧЧ�������������䌍�H�������������g����ճ�ӿ��Խ�Q�������W��(w��n)���Ԇ��}��Ȼ�����F(xi��n)�н���ճ�����������Ԡ���������������r��ͬ�r���F(xi��n)���ӂ����������g����ճ�������փ�(y��u)���������ܣ������R�@������(zh��n)���Ϸ��Ƽ���W�����w���ڈF���(chu��ng)���Ե����ó�֧���۰�����HPU����(g��u)����ճ�����棬ͨ�^����ֱ�������ڲ��ϵ�ȱ�����г߶����£���Ч���ƽY(ji��)��(g��u)ȱ�ݣ����F(xi��n)�˸��_5095 J m-2�Ľ����g�ԡ�ͬ�r��ԓ�F���HPU��ճ�ӽ����Y(ji��)��(g��u)�������������g��ӣ�spacer�������ڼ��d�^���пɏ������������푑��ٶȣ�ͬ�r�����������w���ȣ��@�������˂��������`�����c��͙z�y�ޣ���K���F(xi��n)���Զ��ӂ������ژO�˹��r�µĽ��淀(w��n)�����c�������܅f(xi��)ͬ����������һ��������������ṩ���µ��O(sh��)Ӌ���ԡ�

�о��F�����ͨ�^�����O(sh��)Ӌ���ϳ��˾��Ѓ�(y��u)�����W���ܵ�HPU�����w���@�N����������ӽY(ji��)��(g��u)�����еĚ��I���ã����F(xi��n)���ߏ��ȣ��s44 MPa���������ԣ��s1000%�����о��l(f��)�F(xi��n)��HPU��ȱ�����г߶ȼs��77 ��m�����Y(ji��)��(g��u)�ߴ�С���@һ�ֵ�r�����ϱ��F(xi��n)�����@�ijߴ�Ч���������S����ֱ���ĜpС�����g���@���������о��ˆT����3D��ӡ�cģ����Ƽ��g(sh��)�Ƃ���һϵ��ֱ����50 ��m��800 ��m���߶�200 ��m��HPU���������ͨ�^�܄���Ûճ�Ә�(g��u)���˲�ֱͬ����HPU��ճ�ӽ��档
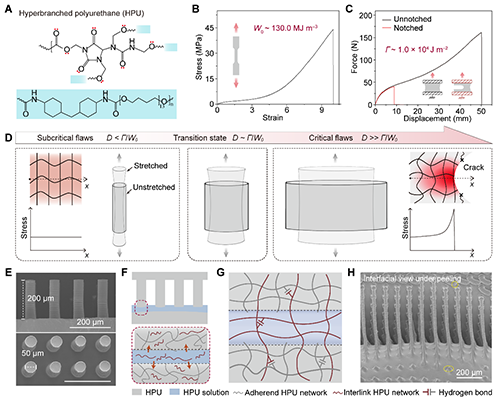
�D1. ���ڸ��g��HPU�������昋(g��u)���c�ߴ�Ч������
���愃�x������yԇ�l(f��)�F(xi��n)������ֱ��С�ڲ��ϵ�ȱ�����г߶ȕr������(n��i)���������܉��T���Ѽy�Uչ���R��ȱ�ݣ�����ܳ��ܸ��������׃�Σ���Ч���������g�ԡ����w���ԣ�����ֱ����50 ��m�r�������g���_����5095 J m-2���Ȃ��y(t��ng)ճ�ӵ��������g������һ����(sh��)�������ϡ�

�D2. ���Y(ji��)��(g��u)�����ճ������
���⣬�@Щ���Y(ji��)��(g��u)���H�����˽��淀(w��n)���ԣ�߀�������������x늂������У������P(gu��n)�Ispacerʹ�á���������(g��u)���ϣ�����ֱ����������늘O֮�g�����ֲ��ڂ��Ѕ^(q��)������ܣ��c�x�����z�ӹ�ͬ��(g��u)�ɂ��І�Ԫ���_����ͬ���܌�֮�g�ęCе�B���c�Y(ji��)��(g��u)��������

�D3. ��spacer�x늂��������Y(ji��)��(g��u)�O(sh��)Ӌ�c��������
�@Щ���Y(ji��)��(g��u)���H�����˽��淀(w��n)���ԣ�߀�����������spacer�l(f��)�]���P(gu��n)�I���á����������܉��r�܉�����������Ч�����ˉ��s����IJ���Ӳ���F(xi��n)��ʹ�Â������܉��ڴ�������(n��i)�����^�ߵ��`���ȣ�0�C450 kPa��(n��i)��73 kPa-1��450�C2500 kPa��(n��i)��52.8 kPa-1���������˂��y(t��ng)spacer���׳��F(xi��n)����̖͆��}��ͬ�r�����Y(ji��)��(g��u)�ڼ��d�cж�d�^���б��F(xi��n)����Ə��ɵ�푑��О飬����Ԫ�����Y(ji��)�����������Y(ji��)��(g��u)�܉���Ч�����ጷő�׃�����@�����������d-ж�d�^���еĽ��������p�ģ��Ķ����������������푑��c�֏��ٶȣ�ʹ���܉�푑����_7000 Hz�ĄӑB(t��i)�Cе�̼���

�D4. ����������������
���g���������ڷ���Ħ�������ܱ��ַ�(w��n)���B�ӡ�������ʩ��750 kPa������165 kPa���Б����ėl���£���(j��ng)2�f��ѭ�h(hu��n)Ħ����ݔ����̖��Ȼ��(w��n)���o���@Ư�ƣ�������(n��i)�������܌ӱ������δ���F(xi��n)���x���eλ���w�F(xi��n)���O�ߵĽ���ƣ�ڿ��Ժ��L�ڿɿ��ԡ�
�ڌ��H���÷��棬�о��F��Mһ����ԓ��������м��ɵ��C�����Aצ�������ɹ����F(xi��n)�ˌ����_2.0 kg�Ć�⏵ķ�(w��n)��ץȡ����ץȡ�^���У��������ʴ_�R�e�˲�ͬ�����µ�ץ��׃���������L�_1000�ε����¿����Ƅ��^���б����˳�ɫ�ķ�(w��n)���ԣ��h�h���^���y(t��ng)PDMS���b�����������ܣ��w�F(xi��n)���@���đ��Ã�(y��u)�ݡ�

�D5. ��������ڙC����ץȡ�����еđ���
���о���ʾ�˻��ڳ�֧���۰������ijߴ�Ч�����g�C�ƣ����ɹ����䑪�������Ԃ������У����F(xi��n)�˽���ճ�ӏ����c�������ܵąf(xi��)ͬ�������������䃞(y��u)���ęCе��(w��n)�����c���١����`����푑�������ԓ�����ڙC����ץȡ����ȘO�˹��r�±��F(xi��n)����ɫ�Ŀɿ����c�����ԡ�ԓ�Y(ji��)��(g��u)�O(sh��)Ӌ���Ԟ�������������м�����W��(w��n)�����c����푑��Ե�������(g��u)���ṩ����˼·�����������ܙC���ˡ��t(y��)���������˙C�������I(l��ng)��l(f��)�]һ�������á�
ԭ��朽ӣ�https://doi.org/10.1016/j.matt.2025.102221
- ������������/������ڈF� Macromolecules�������ܳ�֧���۰�������x��ԭλ��ҕ�� 2026-02-09
- �Ͼ��֘I(y��)��W���︱���� Carbohyd. Polym.��ľ���ߏ���ճ���Ԍ��ˮ���z�������Ԃ����� 2025-09-28
- ���|��W������ Small���C���W���o���ı�����Ԅ������Ϳ���Ûˮ���z���Ԃ���������ˮ���ք��R�e 2025-05-26
- ����������W���겨���� AFM��Ƥ�w���|(zh��)�ӆ��l(f��)�ı������������x��ˮ���z�����������Ԃ����� 2025-04-14
- �����i־��Ժʿ�c�����������/�ƾ��_������o��-ˮ���zճ�ӷ�������������ֲ 2021-11-11
- ��������Rͬ�c�����n�}�M��AFM����ܛ����Ϗ��gճ�ӵ�һ�Nͨ�ò��� 2020-07-17
- �����W�i־�������n�}�M��˲�r���g�ǹ��rճ�� 2019-09-12
�\���P(gu��n)ע�߷��ӿƼ�

- ���a(ch��n)���h�Ӱ�������^��PMEC...
- ��ʲô2026����ИI(y��)���h����...
- ��ˎ����Ч����������PMEC C...
- 2026����ߌ��Ї�����Ұl(f��)չ...
- �����I(l��ng)Ʊح300+���h��I(y��)�R��...
- �P���Ж|�����L���Ѓx�����{...
- �f����Ŀ �ذ��_�֣�2025�C...
- ICIE���H(�V��)Ϳ�Ϲ��I(y��)չ�[...
- �_չ�ڼ����ۄ�������朄�δ...
- 9������Ҋ���£�AI�(q��)��+���a(ch��n)...
- �P(gu��n)���e�k�ڶ�ʮ�����Ї����H...
- �۳Ǵ�Steven Wang���ڡ��^...
- �����ֿƴ��䏩/�ǫI�¡���...
- ���������ƾ��_���ڡ������i...
- �A�ƴ��T�ض����ڈF� Macro...
- �����������/���t(y��)������� ...
- ������ꐏ����ڈF� Matter...
- �������մ�/���� AFM���w�S...
- �A������߅�������w�i������...
- ���A��W���r�F� AFM���U�f...
- ���������x�����ڈF� Nat. ...
- �A�����������塢�V�|������...