����Ƥ�w��һ�N���пɾ���푑��ԵĹ��ܲ��όӣ��ɾo���N���������L����Ŀ�˱����γ�һ�w��ϵ�y���Թ��z��ˮ���z�Ȟ������ܛ���ϣ������ģ�����p�|�����ԣ��ѳɞ鹦��Ƥ�w�ij����x�IJ��Ƅ�����ܛ�w�C���ˡ�������ӡ�������������OӋ���I��đ��á�Ȼ������Ŀ�˻����в�Ҏ�t�Ď��Π���s�ı����Y���Լ��ӑB׃�ε����c�r������Ƥ�w�IJ����L�ڵı����N����Ȼ��������
���y����Ƥ�w�IJ�����Ҫ�ЃɷN��ʽ��һ��ճ���A�Ƶı�Ĥ��ճ���Բ��ϣ����dz��eҺ�wǰ��w��ԭλ�̻����A�Ʊ�Ĥ�m������ƽ����չ���棬���ڏ��s�������ܹ����ؓ������y�Ԍ��F�o�p���|��ճ���Բ����m��ͨ�^��ܛ��׃�N�����棬�����w�e���ص����c�����w�������������֮�£�Һ�wǰ��w��ͨ�^��Ϳ����Ϳ��ˢͿ���ӡ�ȷ�ʽ���F���θ��w������Ȼ���R�������c�����|���g�ę�⣺��ճ��ǰ��w�ӹ�����������������ճ��ǰ��w�Ɍ��F�������e�s��ه���s�Ķ����䷽�c�����Ĺ�ˇ���̡����⣬�̻��c��̎�����EҲ���L���Ƃ�r�g�������ˌ��H���á���ˣ�ؽ��lչһ�N���١������Ҹ�Ч�������Ƃ���ԡ�
2026��1��24�գ��㽭��W�������W���ė������о��T�����F�L���ں͏͵���W÷�r���о��T������ͬ��Advanced Functional Materials�ڿ���Spraying Conformal Hydrogel Skins as Functional Platform���}�����һ�N���͵Ķ��ˮ���zƤ�w�Ƃ似�g���F��ڴ�ǰ���z�ɷ۵��о����A�ϣ�Military Med Res 10, 15 (2023)��Small 21, 2408780 (2025)��Natl. Sci. Rev. 12, nwaf042 (2025)������،����N���ܽM�֣����������w����׃ɫ�w���Լ��ɹ������c������Ƕ�뵽���z�ɷ��С�ͨ�^һ����Ϳ���������ܻ������z�ɷ۳��e��������Π�Ļ����ϣ����ܱ����ؓ�Ͳ��ϷN�Ӱ푡��S�������ˮ������ʹ��ĩ���������γ�һ���߶��m�ε�������ˮ���zƤ�w���o���~��Ĺ̻��^����ԓ���ԽY����Խ�ķ�ĩ���淀���Ժ���Ϳ��������ԣ�����K�γ��Ĺ�����ˮ���zƤ�w���г�ɫ���m�������B�m�ԡ������Ժͺ���ɿ��ԡ�Փ�Ĺ�ͬ��һ�������㽭��W���պ���WԺ�������W���IJ�ʿ��Ԭ�x�������h��ԓ�о��õ�������Ȼ�ƌW����ί��֧�֡�
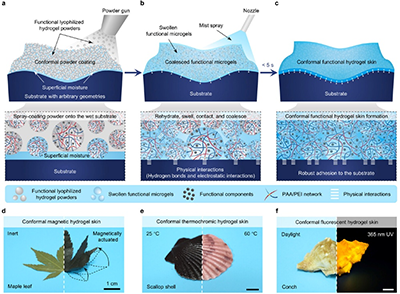
�D1.���z�ɷۇ�Ϳ�������ڲ����m�ζ��ˮ���zƤ�w��
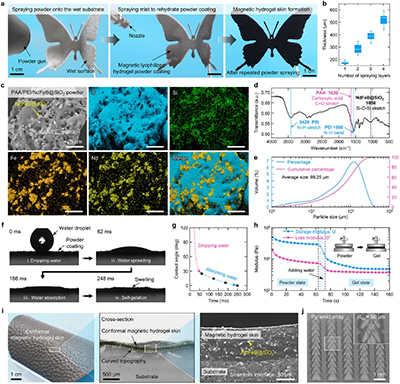
�D2.����ˮ���zƤ�w�ć�Ϳ�Ƃ䡣
����Ĵ���ˮ���zƤ�w�Թ����ã��܉����Ť�����������ۯB������������F�Ɠp���ӻ���滬�ơ�ͨ�^180��˺�ќyԇ�y��������ˮ���zƤ�w�Ĕ����g����33w%NdFeB@SiO2�w��ؓ�d�����g�Գ��^800 J/m2,60wt%ؓ�d�³��^500 J/m2�����⣬ͨ�^90�Ȅ��x�yԇ�y���˴���ˮ���zƤ�w���ڸ��N��ܛ�̈́��Բ����ϵĽ����g�����yԇ�^�������И�Ʒ�����F���Ⱦ��Ɖĺ߽����g�ԣ�PDMS>480 J/m2�����z>590 J/m2������>570 J/m2��ľ�ġ��մɡ���F>600 J/m2������>690 J/m2��
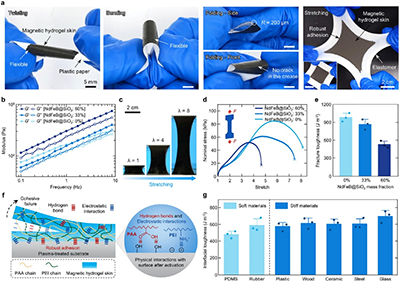
�D3.����ˮ���zƤ�w�ęCе���ܡ�
�@Щ�m���N�ϵĴ���ˮ���zƤ�w�܉��o�B���w�D׃��ܛ�w�C���ˣ�ͬ�r����������ԭʼ�ΑB���^�Y����������������Ե���ʾ������������ˮ���zƤ�w��Ϳ�ڏ����w��Ĥ�����~��Һ�B�������ϣ��S���M��ȡ���Ż����@Щܛ�C�������ɺ�ķ��Ɲ��Ȧ�������w���ƕr��չʾ������ᡢץȡ���\��������ͬ�r�߂��ί��Բ���������

�D4.�m�δ���ˮ���zƤ�w���w��ܛ�w�C����չʾ��
���⣬����߀�_�l�˟���׃ɫ�͟ɹ�ˮ���zƤ�w���@Щ���ܷքeͨ�^�̘I����׃ɫ�w����AgInGaS/ZnS�����c���F��ͨ�^�M���OӋ���������@�ɷN�����������ϵ�����ܛ�C�����У�ʹ���܉�ģ�M���m������ɫ�͟ɹ��О顣

�D5.ܛ�w�C���˵���ɫ�͟ɹ⡣
���Y���ԣ��������_�l��һ�N�������z�ɷ��ć�Ϳ�����܉���ٱ�ݵ����칦����ˮ���zƤ�w���cʹ���A�Ʊ�Ĥ��ճ���Բ��ϵĂ��y������ͬ��ͨ�^��Ϳ�߾��ȵس��e����ĩ���������N�ϻ��ױ����Πͬ�r����ԭʼ�ߴ���^�Y���������c����Һ�wǰ��w�ļ��g��ȣ����z�ɷۇ�Ϳ�H��һ�����F���E�����|�l˲�gˮ���������Ķ�ʡȥ�˺ĕr�Ĺ̻��^�̡�ԓˮ���zƤ�wƽ�_δ����ܛ�C���ˡ��N�����������b�á���Ƥ��ӌW�������@ʾ�����M�����t�Wϵ�y�����������ЏV韵đ��Ý�����
朽ӵ�ַ��https://advanced.onlinelibrary.wiley.com/doi/10.1002/adfm.202527145
- �����/�S�G/�w�o��ACS Nano�����ɇ�Ϳ�h��푑���ˮ���zͿ�����܃�Ƥ���Ϸ��B���ƽ������٪Mխ�y�} 2025-06-04
- �Ї������W�RӾ�ص� Small���ɇ�Ϳ�����ӱ��������z 2025-05-15
- ������W����淽��ڡ��쳿�x���ڡ���ꖸ����� AM�����ڷ�����Ѫ��;���Ķ������֬�|�w�{���w���ɇ�Ϳˮ���z�ί����ɉ����Ԅ����Ѫ 2025-04-19
- ������������ֽ����n�}�M ACS Nano/Nano-Micro Lett.�C������푑�ˮ���zƤ�w���Ϻ͌�늂��ڷ����I���о��Mչ 2021-12-20
