����Ȼ�磬�S��ֲ��̈́��ﶼ������˲�g׃��������P�I��������ω�����ڲ��� 0.1 ��Ⱥϔn�~Ƭ���C������ں���֮�g�������x���@Щ�@�˵Ą��������������s�ļ�����ƣ�����ͨ�^�ȃ��揗�������������|�l�r˲�gጷ���ɵġ��@�N������ʽ��׃�μȿ졢�ֿ��桢߀�O�九����������Ȼ�����ĽY���ǻ�֮һ���ܵ��@�N����������ʽ��׃�εĆ��l�������ˆT�����Lԇ���˹������Џ�����ƵęC�ƣ� �����w���������ΑB�����١��OӋ���gխ���Ƃ���y���ĵȆ��}�����������S��֧�νY���У�Ҫ����Ȼ���ǘӌ��F���ӻ�������Ŀ�����׃��һֱ�ǹ��̺ͿƌW��Ĺ�ͬ����
2025��10��10�գ����������_���{������W���ܽ����n�}�M��Nature Materials �ڿ��ھ��l���}�� ��Reprogrammable snapping morphogenesis in ribbon-cluster meta-units using stored elastic energy�� ���о�Փ�ġ����������һ�Nȫ�µĽ�Q�������������\��س����φ�Ԫ�����@��һ�N�������S���g��ͨ�^�����ܴ惦��ጷŁ팍�F�ව�B��׃�ĽY����ͨ�^���s��Ť�D������Ԫ����չ�F�����^ʮ���N��ͬ�ķ����ΑB�������چη��B���p���B�������B�����ķ��B֮�g�Լ�ʮ��N��ͬ���S�ΑB֮�g�����ГQ������׃߀��ͨ�^�ň����F�h�̡��ǽ��|�������@һ�l�F���Hͻ���˂��y�������OӋ�ľ��ޣ�Ҳ��δ����ܛ�w�C���ˡ���չ�Y�������w�����������_����˼·��Փ�ĵ�һ���ߞ�������ʿ��
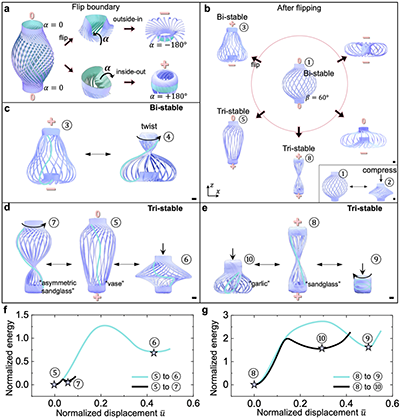
��һ����Ĥ���ɾ��̶ව�B���\
�о��F������һ�N������Ч�������cճ���Ƃ䷽�������ۺ��ﱡƬ���� PET Ĥ���ü�������ƽ����߅�Σ������в��и�����lƽ�м��������ɶ˵Č���߅�����M���B�ӣ������γ�һ����֧�ε����S���\�Y�������ƺ��εĽY�����s�N���S���Ďμs���c�����C�ơ��о��l�F���Y���ĵ�һ���W���� ���������lƴ�ӽǶȣ�������ϵ�y��ʼ�ă��ܸ�֡�
�� �� = 0 �r���l������ƽֱ��������С���S�� �����l�����ȏ����cŤ�D�����揗�����������ډ��s�r�|�l�����S���D׃��ͨ�^�{�� ��������Ԫ�����ڷ������η��B���p���B֮�g�����ГQ�����F���A�y���������^�c�ΑB·�����D1����

�D1:�ව�B�������\
���D���F���ؾ��̵��ΑB�M��
�����˲�Ŀ���ǣ�ԓϵ�y���Ƃ���ɺ���Ȼ�߂�Cе���ؘ��ԡ��о��F�����ڶ����W�����������D�ǣ���ʹ�ýY��������߅����������ⷭ�D�g���·��䃦�ܡ�ͨ�^���N���нM�Ϸ��D����߅��������Ԫ��������ȫ��ͬ�����S�ΑB֮�g�����ГQ����������ƿ����ɳ©�����F�w�������D2����ÿһ�N�ΑB�ډ��s��Ť�D������ͬ�r���s��Ť�D�����£����в�ͬ������������׃��ģʽ���@��ζ�������D�������{���Y���߂������ؘ������B�ݻ����������Q��֮���� �x���˳����ϡ����،��ęCе���a�����Y���߂���m�M���c�����پ��̵�������
�D2�� ���ؘ������ؾ��̟��\
�ΑB��·���D��
�о��F��Mһ�������˵������W���ǣ�Ť�D�����������{�����wŤ�D���� ��׃������׃�ΑB�ГQ���������ϣ��Ķ��|�l��ͬ�������S·���������������ƿ����׃����ɳ©�������D���������������о��ˆT�����������Pϵ���L����һ�����ΑB�Cʧ�����D�����@���D����һ�����S·���D����ʾ����ͬ�ǶȽM�ό������ΑB�ֲ��������������ԏ�Ŀ���ΑB�����OӋ���������F�Y�����������OӋ�����Ĵˣ����s�ď���׃�β�����ه���͌���ֱ�X��������һ�Ӿ���Ҏ����

�D3: �ΑB�Cʧ�����D
�h�̴ſ��c��������
�������\�������������о��F��ڽY���ϼ���һ�ӱ����Ĵ���Ĥ���@��һ����ֻ���׃�ⲿ�ň����������� 0.06 ���Ѹ���]�ϳ��������������� 0.04 ������¾`�š�����չʾ�˶�N���͑��ã��D4����
-
������ʽ����ץȡ��������ˮ�¿��ٰ�����ץȡ�~���ܛ�����w�����F�������Ч�IJ��@�cጷţ�
-
�ɿ����w�y�T���Y��������ƿ�B���r���w��ͨ�^����׃����ɳ©�B���r�t��˲�g�P�]ͨ�������F�������w�{�أ�
-
��չ�_�CеԪ�����o���Y�����ں��뼉�r�g��ጷŃ��ܣ�Ѹ����Û���ߴ��ΑB�����ڴ��_���s�ܵ������Է��b��
����ϵ�y�o����s�Ě�ӻ�늿عܾ����H�����ň����Ɍ��F��Ч������ĄӑB��׃��չ�F���O�ߵČ��Ý�����

�D4:�h�̴ſؙCеܛץ�ֺ����صđ���
�Ĕ��Wģ�͵��ɾ������W
���˽�ʾ�@�N���\��׃�����ԭ�����F�߀������һ�����Wģ�ͣ���ʾ�Y���Ƕȅ����c�����ֲ����ΑB�D׃֮�g�Ķ����Pϵ�����@��ģ���҂��܉��A���OӋĿ���Π�{�������ԣ�����������ጷŵď��ȣ���Փ�ĵ�һ���ߺ��ʿ��B�f�����@Щ�������ڌ��F���ܻ��OӋ���P��Ҫ����
���ܽ����Mһ��ָ�������҂����о����H��������Ȼ��ď��Sʧ���F�������˿��ؾ��̵����W�OӋ��ܣ������ܲ��ϡ�ܛ�w�C���˼���չ�Y�����аl�ṩ��ȫ��˼·����
չ�����Y���߂�������������
�@�N�����\��س��������ØO���ĎΘ��쌍�F�ˏ��s���ΑB�ГQ�� ��ɶ�ģ�B�ؘ����ܽY���ṩ���µ����W��ܡ�δ����������չ������߶ȡ������s��ϵ�y������ͨ�^������Ԫ�M�������\����������FȺ�wʽ�fͬ׃�Σ� ���Ͼ߂���ߌӴε����Y������������Y��Һ�������w���߷������z�Ȳ��ϣ��Y���߂�h����֪�c���m��������Ҳ�Sδ�����C���˻�Cе����O�������ٿ������\�У����ǿ��Y������˼���c�Єӡ�
ԭ��朽ӣ�https://www.nature.com/articles/s41563-025-02370-z
Join Jie Yin Lab �C Ph.D. Fall 2026
�����_���{������W���ܽ����n�}�M�\�����㲩ʿ�����룡
�������
-
��������ܛ�w�C����
-
��׃�Cе������
-
�t�������c�ɳ��m����
��ʲô����ԓ�Fꠣ�
-
����ҳɹ��S����90+피��ڿ�Փ�ģ�PNAS��Science Advances��Nature Communications��Nature Materials��Advanced Materials��
-
�����s�u�������m���y����ƌW���c���̎����ڳɾͪ���PECASE�����������ҿƌWԺPNAS Cozzarelli����NSF CAREER����Extreme Mechanics Letters����ƌW�Ҫ���
-
��W�Ƅ���ƽ�_��̽�����ܲ����c�C����ǰ��
-
�C�����c���H피�F��������c�����I�ȿ��У����Bδ�������c��������
��Ո��ֹ��2025��12��15�գ�2026���^��W
Ԕ��/��Ո��https://jieyin.wordpress.ncsu.edu/opening/
- ������������ Sci. Adv.�����Գ����� - ���S�C������ 2026-03-21
- ������ܽ��ڈF� AFM���p�ӳ����ό��F늴Ų����Ղ�ݔһ�w�� 2026-02-03
- ���������Ŀ�/����x�� Matter�����ֻ�ȫ��λ���̃ȑ��� - һ��Ĥ�[��N���D�� 2025-09-23
- �Ϲ�����f�F� AFM��ֲ���~Ƭ���l�Ŀɾ�����׃�c����׃ɫܛ�w���� 2026-03-28
- ������W���һ�n�}�M Macromolecules�����ڿɾ��̦�-�����Ķ����Π�ӛ���۰�������� 2026-03-10
- ���ݎ�����W������/�ǰغ�F� Nat. Commun.���ɾ����ӵ�JanusҺ�������w�w�S 2026-02-04
- �����������܈Fꠡ�Adv. Mater.���_�ū@ȡ�C�����p���B�Ͷව�B������ܛ�w�C�����еđ��� 2022-02-19
