�ܵ�ܛ�w�������w�\���`���Ժ������ԵĆ��l���܉��ⲿ�̼��D����׃�κ��\�ӵ�ܛ�����ѱ��_�l����������ܛ�C���ˡ����켡�⡢�ɴ����O��������t�W���I���@ʾ���V���đ���ǰ�����c���y�Ą���������ȣ�ܛ�������г�ɫ���`���Ժ��S���Ŀɲ����ԡ�ܛ�������\��ͨ�������܉�����푑��ⲿ�̼���ܛ���ϣ������׃���ϡ��Π�ӛ���ۺ����푑����z�ȡ�Ȼ�����μ����ӿ����ܵ��h���m���Բ�͆�һ�\��ģʽ�����ƣ������ɶ�̼�푑��Ķ༤����������Q�@�����}����ˣ��_�l���ж�̼�푑���ܛ�������m�����s���\��Ҫ��ɞ�һ�����
�b�ڴˣ��Ї��ƌW���g��W���d�����ڈF���������ȡ��̻���Һ�w���b���ԣ��_�l������ܛ�����ďͺϲ��ϣ�����Ќ����Ч���ʹň��Ķ�̼�푑����ڽ��t���̼��£����П����Π�ӛ��Ч����Һ�������w�������F����⏝�������ͺϲ��ϱ��F���������������ڶ༤������չ�F��ԭλ�D������ض�·�����е����������P�о��ɹ���������Multi-stimulus responsive soft actuator with thermotropic shape memory and local magnetic programming properties�����}�l���ڡ�Composites Part B: Engineering���ϡ�Փ�ĵ�һ���ߞ��Ї��ƌW���g��W���̿ƌW�WԺ��ʿ�о����O��t��ͨӍ���ߞ����d�����ں�ɣ�����θ��о��T��
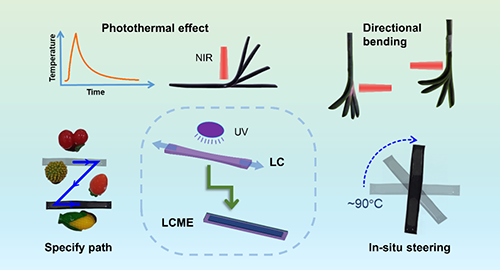
���ˌ��F��̼�푑���ģʽ��������̼�{�ܣ�CNTs����Һ�������w��LCE��������׃Һ��MRF����Ecoflex�M�b�����ԏͺϲ���LCE-CNT/MRF/Ecoflex��LCME�������У�LCE��һ�N�W��Y�����ϣ�ͨ�^��Һ����ԪǶ�돗�Ծۺ����в��m�Ƚ����γɣ����ܛ���Ժ͟����Π�ӛ�����ԡ���CNTs�Ĺ��Ч���o���£��ض����ߌ��º���CNTs��LCE��LC����Һ����Ԫ���������У�ʹLC�ڳ�ʼ���ú͟�������֮�g���F������p��׃�Ρ��o���ӄ��ĸ����ܴ���׃Һ��ͨ�^�x��Һ�w���ͻ�������dҺ�Ƃ�ģ�����LCME�ṩ���������\�ӷ�����ơ�

�D1. ����ȡ��̻���Һ�w���b����
�LCE���^����ȡ��������̻��Ƃ�Ɇή�LCE���V��X�侀ɢ�䣨WAXS���D�V����LCE�ĸ���ͬ�����нY���D׃�����A���췽��ȡ��Ķ������нY�����ή�LCE�ڟ�̼����������D׃�����ͬ�������LCE�������º��^�߶��ϵ��տs׃�Σ��@�N����׃���������Q������Π�ӛ�����ԡ�����0.2 wt% CNTs�Ćή�LCE��ƷLC0.2���F����ߵ�����ȡ����⣬�ή�LCE�Ĕ��ё��������˽�5�����䏗��ģ�������쏊���@�����ӡ�

�D2. LCE��LC�ĽY������
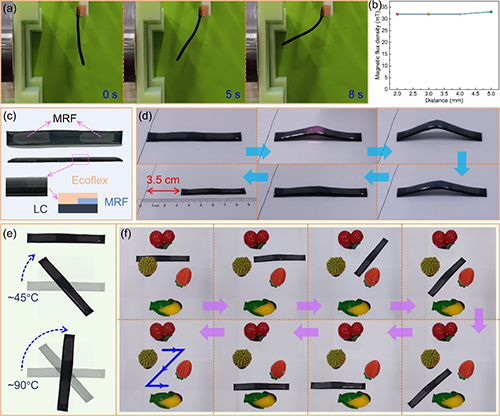
IL-SO-MRF�ǻ����x��Һ�w���ͻ���dҺ�ğo���ӄ������ܴ���׃Һ�����F�����@��MRЧ�����o�ň��r���F��Һ�w�������ԣ��дň��r�����w���شň��������г�朠�Y����IL-SO-MRFҲ��Һ�B�D׃��̑B������ģ���͓p��ģ����׃���w�F��IL-SO-MRF��B��׃����IL-SO-MRF�ļ��Б����S���ʻ��F�ۣ�CIP�����������Ӷ����ӡ���LCME�����\���У��Ϊ��Ĺ���ӛ]��ָ���ԣ���IL-SO-MRF�Ĵ����Ԟ�LCME��׃���ṩ�������c���Ķ����������Ƅ������\�ӷ���

�D3. IL-SO-MRF�Ĵ���׃����
CNTs������ʹLC���F���@���Ĺ��Ч����LC�й��Ч���a������ߜض��c���t���ݗ���նȳʾ������P��LC�ڹ��׃��ѭ�h����б��F��������ѭ�h�����Ժ��;��ԡ��ڽ��t���Ķ̕������£�LC�ăɂȜز�²�ͬ���տs׃�Σ����ڱ�����ȵĜض��^�ߣ��l������⏝����LC���ӑ������_0.35 MPa�����F������������ܡ�����Ecoflex�ӵ����Ժⲻ�����ԣ���LCME�ăɂȷքe�ܵ����t�������r�������l����L�ȏ����Ķ���׃�Σ����F����Ч�Ĺ��Ч���̓����ď��������ܡ�

�D4. LC��LCME�Ĺ��Ч����׃��
�ڴ�s13����������������ؓ�d�£�LC�ڽ��t�������°l��28.6%���տs��׃���������ͨ�^�Y���OӋ�_�l��LCEc����LC�cEcoflex�ͺ϶�δ����MRF��ܛ�������ڽ��t���μ������£�������ڼ����ψ��І��������\�ӡ�ͨ�^����Ԫ����ģ�M�������^���е�׃�κ�λ�ơ�Ȼ����LCEcܛ�������\���ܵ����È������\�����ɶȵ����ơ�

�D5. LCEc�����
LCME�ڹ��Ч���µğ���׃���ǟo�����Եģ����ň����Ԟ����ṩһ��ʩ���c���Ķ������Ϳ���LCME���\�ӷ���LCME���R���Ӵň��cIL-SO-MRF�����������������P����LCME���Ƃ��^���У����������OӋIL-SO-MRF�����^���@�w�F��LCMEܛ�����Y���ľֲ��ž������ԡ��cLCEc��ȣ�ͨ�^��LCME��׃�κͻ֏��^���Ќ�ʩ���ƌ���LCME������ƽ�����M���p�����к�ԭλ�D���@���H�����������ĽY���OӋ�������������h���m���Ժ��\�����ɶȡ�ͨ�^��LCME�����������p�����к�ԭλ�D����Y�ϣ������Գɹ�����ƽ���ό��F�������в����_�ϵK�
�D6. LCME�Ĺ��ʹ���
�C�����������о�ͨ�^�����й��Ч����Һ�������w��LC�������д��������ԵĴ���׃Һ��IL-SO-MRF����ܛ����Ecoflex��Y�ϣ��_�l��һ�N���П����Π�ӛ���;ֲ��ž������Ե�ܛ����LCME��ԓLCMEܛ�����Y�����p�����к�ԭ���D��ɷN�\��ģʽ�����б������������F����ָ��·�����еď��s�\�ӡ�ͨ�^�Y�Ϲ��Ч���ʹň��Ķ༤���ӣ������������ĽY���OӋ������������ĭh���m���Ժ��\�����ɶȡ�ԓ�����������༤�����������S��ܛ�������\��ģʽ������ܛ�C���˵İlչָ����һ�����ڵİlչ����
ԭ��朽ӣ�
Yuxi Sun, Min Sang, Wenwen Li, Zimu Li, Yu Wang, Huaxia Deng, and Xinglong Gong. Multi-stimulus responsive soft actuator with thermotropic shape memory and local magnetic programming properties. Composites Part B: Engineering, 2025, 112964. DOI: 10.1016/j.compositesb.2025.112964.
https://doi.org/10.1016/j.compositesb.2025.112964
- ����R�N�x/�ܝɺ���TUD/MPI-MSP��ȪȪ AFM��������Ҏģ���z�Wӡˢ�ӹ�����̼�푑���������ٽ���Ĺ��ܻ��������� 2025-11-25
- ���]�S�S�F� ACS Nano�����Ƴ����� Janus ��Ĥܛ�w���� - ���F��̼�푑������� 2025-09-11
- �㽭�Ƽ���W�ρ���/���ϴ�W����/�R�����I��W�����A CEJ���w�S�ؼ{���w�͵����܄�����M�b�Ƃ����Զ�̼�푑����ӱ�Ĥ 2024-04-18
- �A�ώ����� JCIS���Ծ۶�Ͱ������w�S�ؼ{����MXene����{���������ϵ�Һ�������w������ܛ���� 2025-05-12
- �Ї��ƴ����d�������n�}�M CEJ�����ڌ�늴���׃Һ�����Ԃ��������F�ſ��{���Ⱥʹ��� 2024-04-19
- ���������G���ڈFꠡ�Mater. Horiz.�������^խ��푑��ضȅ^�g�ȳʬF�����Ŀ��������Ե��p���Π�ӛ���ۺ��� 2023-04-23
