���գ�������W���WԺ���h��F������һ�N����տs������늴ŏ����w�әC�ƣ������y��ݔ����늴��Ӹ�Ч�Uչ��ܛ�w�C�����c���x�߶��͙C�����I��ԓ�C�Ʋ��H�߂䃞��ݔ�����ʹ���׃������߀���ڵ�늉��l���·������������F���ڑ���h���е���ȫ�����ӡ���δ��С�ͻ����o�����������ܵ��������x�C����ϵ�y�ṩ��ȫ�½�Q������

���P�о��ɹ�����Muscle-Inspired Elasto-Electromagnetic Mechanism in Autonomous Insect Robots�� ���}�l���ڡ���Ȼ-ͨӍ����Nature Communications����
����Ȼ���У�����ͨ�^������տs�c���ɮa��������������F�`���Ч���\�ӣ����������x��С�߶������У��������߂�ĸ����|���Ȍ��ڿ˷��h���������P��Ҫ�����֮�£�Ŀǰ���������C��������ه����늙C���������X݆���S�еȏ��s�Y�����y�����Լ��ɵ�ܛ�wϵ�y�У����ڳߴ��ͻ���������@���ϵK���M�ܽ�������˹����⡱�����ܲ����Ӽ��g�����Pע��������ͨ����Ҫ���̵��ӗl�������늉������ň����գ�����ݔ���������ޣ��y��֧��С��ϵ�y�ĸ�Ч�����\�С���ˣ��F�е���ܛ�w�C�����Զ���ه�ⲿ�̼������y���F�����ğo���������⻯���������\�ӡ�

�D1�������c�����C���˵�ݔ�����|�����c�տs׃������
��M����ܛ�w�C���ˌ���ݔ��������׃������푑��͵��ܺ��ӵ�����������W���h��F������һ�N������늴ŏ����w�әC�ơ���Elasto-Electromagnetic mechanism, EEM������ͬ�ڂ��y�˹�������Ҫ��هܛ���ϱ������Ԍ������푑��������ӗl�����̣�EEM ͨ�^�����w�ĽY�����OӋ���Y��Ӳ���cܛ���g�ď���������ģ�M���A����տs�����F��Ч�ӡ�

�D2�������c�����C���˵�ݔ�����|�����c�տs׃������
ԓ�C���������֘��ɣ�Ӳ���w��Ƕ��ܛ����������Ȧ���Լ���׃�εď����w�Y������D2������������ڃ��c��һ������Ӳ���cܛ���g���o�B�������ӏ����w�տs�����ݔ���ͬ�r�����傐Ɲ��������ܛ��푑����Ķ��ӑB�{�����������ݔ������׃�η��ȣ�����ͨ�^�����w�Y������-λ���������OӋ�����F���ӻ������{�ص����W푑��c���О顣
�D3�������c�����C���˵�ݔ�����|�����c�տs׃������
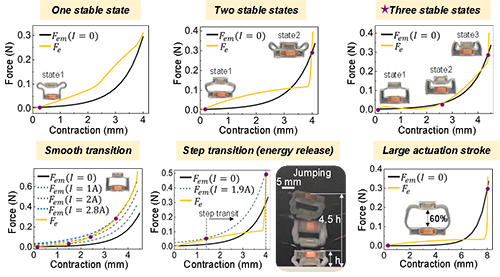
�乤��ԭ���������ʽ����ƽ���{�أ��ڟo�����B�£��������c����ƽ������Ȼ�ɳ�λ�ã�ͨ늺������Ĵ������Ƅ������տs���·����B���{�������С�����ɾ��_����ϵ�y�տs�̶ȡ�ԓ�C�ƾ߂��p���{�����������H���F���_ 210N/kg �Ć�λݔ������60% �Ĵ���׃�������� <4V ����늉���߀��ͨ�^�Y���OӋ���F������m��늡����p���B���������B�i�������������Ч�����w�Y���o���������ͻ���չ�F���ӽ����A��ĸ�Ч�����ԣ��阋�������o�����������h���m���ԏ������x�߶șC�����ṩ����·����
�����@һ����늴ŏ����w�әC�ƣ��о��F��Mһ��������һϵ�о߂���ȫ�����ӡ���ݔ�����ʹ���׃���������x��ܛ�w�C����ԭ�͡��ڶ�N�C�����У����ʽ���ЙC����չ�F��Խ�Ŀ��_�������c�h���m���������{��EEM��ϵ�y�����ĽY��������c�ͻ��w�e��ԓ�C���˼�ʹ�ļs30�߿Չ��䣬�Կ�����ꑺ��^�m�������룬�o�κι��ܓp�����@�N�O���������������ڏ��s�������A�y��Ұ��h���в���춨�˻��A��δ�����@����ԙC���������ɟo�˙C��Ⱥ�߿�Ͷ�ţ�������y�F���ďU��p϶�������ѾȂɲ��c��̖��ӛ���P�I�΄ա�

�D4�������c�����C���˵�ݔ�����|�����c�տs׃������
���⣬�F�߀�_�l��һ���ˮ�Y����ܛ�w��Ӿ�C���ˣ��܉�����ȫ�������ܗl���£�����Ȼˮ�w�г��m�����΄ӳ��^һС�r��չ�F���������m�������c�h���m���ԣ���ˮ�h���O�y�c��Ⱦ̽�y���΄��ṩ���ͻ�ƽ�_�Ŀ��ܡ�
ֵ��һ���߀�����S�C���ˣ����w�̓Hָ���С���s�߂���ȫ��������������Ŀǰ��֪��С�Ɍ��F�B�m������ܛ�w���S�C���ˡ�ԓϵ�yͨ�^�O���Y�����F��Ч����ጷ��c���������F�����m���������Mһ���������S�߶��c�����ԣ������ڏ��s�����µČ��ؑ��ô��_�¿��g��

�D5�������c�����C���˵�ݔ�����|�����c�տs׃������
�ڴ˻��A�ϣ��о��ˆT�Mһ��չʾ�˻���EEM�әC�Ƶ����x���C�����ڴ��d��N����������Эh����֪�΄յĝ��������磬�F������ʽ���ЙC�����ϼ������͜؝�Ȃ�������ʹ�������������M�^���Ќ��r̽�y���o����ݔ��ͬ�h��œ���еĜ؝����ڷ�ˮ���Ӿ�C�����τt�����˾ƾ����w���������ɹ����F�ˌ����]ˮ�w�л��W��̖��̽�y�c�ψ��@Щ��ʾ��C��EEMƽ�_���H�߂䏊����������Ҳ�܉��`����d��N�����c���W���������߂�������s���MС�h���Д����ɼ��c�΄Ո��еďV����չ�ԡ�

ԓ�о��Դń����c���Ԅ��ܵ�ƽ�����A�������һ�N�����y늴�����չ��ܛ�w�C���˵�ȫ�C�ơ�ԓ�C����ܛӲ���w֮�g�ď�������������׃��ͻ�������傐Ɲ������ĵĂ��y�ӷ�ʽ���@����������ܛ�w�C���˵�ݔ�����c��׃������ͨ�^�������w�Y���ĺ����OӋ��ԓϵ�y߀�܌��F���ġ�����Ч�ķ��B�ӡ��Y�����������\�ӡ��h���m�����ܺ��{���c�΄ռ��ɵȷ���ă��ݣ�ԓƽ�_��ĺ��Ѿȡ��h���O�y��������̖̽�y�ȑ��È����ṩ�ˏ������ļ��g֧���c�lչ������
����о������ĵ�һ���ߞ�������W��ʿ���S���r�Ͳ�ʿ���܁�܊��������W���WԺ�vϯ�������h����ͨӍ���ߡ�ԓ�����ܵ��ˇ�����Ȼ�ƌW�����Լ�������W���P���M��֧�֡�
ԭ��朽ӣ�https://www.nature.com/articles/s41467-025-62182-2
- ��������������ڡ�ꐽ�������/���_�������� AFM�����ڶ�߶��Hˮ-��ˮ���泬��푑��c������׃�ĝ��푑�Janus�w�S���� 2025-10-18
- ���A��W������/�����ҽ��ڈF� Adv. Mater.: ��Janus�w���{�ظ߷��ӏͺϲ��ϷӽY������ȡ���Mչ 2024-02-02
- ���ִ�W��¶ȪԺʿ�Fꠡ�Adv. Funct. Mater.��������׃����푑����˹��������� 2019-12-31
- ���������ڣ���r������n�}�M�\�дTʿ����ʿ����ʿ�� - ���ϡ����W���������Cе�����﹤�� 2025-09-17
- ���ڴ�W�S������ڈF� ��Adv. Sci.���C��������ɽ��������ܛ�w�C�����c��������I����о��Mչ 2025-09-10
- �㽭��W�����о��T�F� Nat. Commun.: ��׃�μ��ߡ�Һ�������w�����Ƃ䷽�� 2025-08-18
